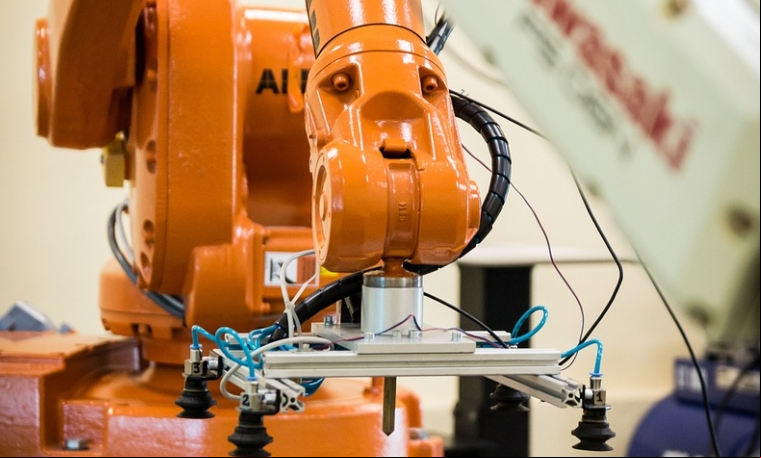
La robtica industrial es una de las aplicaciones ms extendidas de la robtica, debido a que su uso hoy en da abarca multitud de sectores como el automotriz, electrnica, industria alimentaria, farmacutica, aeroespacial y otras muchas que necesitan automatizar sus procesos para aumentar su efectividad y reducir costes.
Pero la robtica no solo tiene un aspecto fundamental en la industria productiva. Existe un tipo de industria que est en continuo crecimiento y que consiste en la fabricacin de esos robots.
La robtica industrial forma parte de la automatizacin industrial y por lo tanto es un elemento necesario de la Industria 4.0.
Qu hace la robtica industrial 2x1k4e
La robtica industrial disea y fabrica robots industriales que permiten automatizar los procesos, realizando tareas repetitivas, complejas o que requieren de un esfuerzo elevado o un proceso peligroso.
Los trabajos realizados por un robot, diseado para ese proceso, aumentan la efectividad y reducen el nmero de fallos o defectos.
Cmo elegir un robot industrial 4y2x6k
La eleccin de un robot industrial, su ajuste y programacin, es un trabajo complejo. Los ingenieros que se encargan de esta seleccin deben tener en cuenta mltiples factores que pueden influir en dicha eleccin.
Existen mltiples tipos de robots, articulados, cartesianos, colaborativos, etc, pero no todos pueden usarse en cualquier aplicacin. Lo primero ser el anlisis del proceso para el que se va a emplear el robot y en base a ello se seleccionar el grupo y marcas ms adecuados.
En segundo lugar, hay que analizar la carga til que el robot debe soportar. En algunos procesos, los robots mueven piezas de gran tamao o peso.
El grado de libertad de movimientos es otro de los aspectos importantes. No es lo mismo un trabajo en el que se realizan operaciones simples como puede ser la carga de pallets, que una operacin compleja como el soldado por puntos del chasis de un coche.
Dependiendo del proceso que se desarrolle, el robot tendr que trabajar con una velocidad de proceso, un grado de precisin determinado o un rango de operacin, en funcin de la altura o longitud que tenga que alcanzar.
Con todos estos datos analizados, se podr seleccionar uno o varios modelos. Ser entonces cuando habr que determinar el modelo que mejor se adapte al proceso a realizar, segn el peso, tamao, sistema de frenado, momento de inercia o nivel de seguridad requerido.
Tipos de robots industriales 43r70
Es complejo definir con precisin los diferentes tipos de robots porque existen muchas variantes que en s mismas pueden suponer una definicin diferente, pero, de forma general, se pueden considerar los siguientes grupos:
Cartesianos
Articulados, tambin conocidos como antropomorfos
Cilndrico
Scara
Delta
Esfricos
Existe un tipo de robot que podra estar integrado en los anteriores y que se denomina colaborativo. No se incluye en los grupos anteriores porque, a diferencia de los modelos industriales, este robot se disea para interactuar con el ser humano en un espacio y trabajo compartido.
Qu es la robtica colaborativa? 4g9x
La robtica colaborativa es una parte de la robtica industrial que aplica una tecnologa especfica para la realizacin de procesos en los que los robots trabajan en colaboracin con las personas.
Aunque el desarrollo de su diseo est pensado para la realizacin de trabajos en determinados procesos industriales, su principal premisa es la seguridad de los operarios que trabajan con ellos.
Este tipo de robots o cobots son fciles de usar y en algunos procesos disponen de un software que les permite aprender nuevas acciones.
Existe la controversia de si la robtica industrial est reemplazando a las personas. En el caso de los cobots o robots colaborativos no es as porque estn diseados para colaborar con las personas y no para sustituirlas.
Usos y aplicaciones de los robots industriales 5y5q45
Los robots industriales y colaborativos son capaces de realizar casi cualquier tarea. Es difcil destacar ejemplos concretos sin olvidar otros en los que tambin es posible su uso.
Algunos ejemplos son:
Alimentacin. Bien sea a lneas de produccin como a maquinaria industrial, como CNC´s o equipos de corte por lser.
Empaquetado y paletizado. Trabajo repetitivo en el final de una lnea de produccin y antes de la entrega del producto. Tambin se usan para lo contrario, despaletizar.
Soldadura. Es uno de los procesos ms habituales en las imgenes que se toman de los robots industriales.
Lijado, pulido, atornillado y pegado. Son procesos tpicos de una cadena de produccin donde cada robot puede tener una misin diferente.
Pintura. La industria del automvil es un claro ejemplo de este tipo de robots. Integrados en las cabinas de pintura, permiten pintar los chasis y piezas de los vehculos con un grado de precisin y calidad muy elevados.
Montaje. Es una aplicacin donde un mismo robot puede realizar diferentes funciones, terminando por s solo una fase del proceso de fabricacin de un producto.
Pruebas de laboratorio. Gracias a los robots, algunos procesos de anlisis de mucha precisin o contagiosos se pueden realizar de una manera rpida y segura.
Quirfano. En operaciones delicadas o poco invasivas, los robots son un elemento fundamental que ha permitido a la medicina realizar un gran avance con un alto grado de xito y una rpida recuperacin de los pacientes.




 Jueves, 22 de mayo de 2025
Jueves, 22 de mayo de 2025